


От камер до нейросетей: как работают системы распознавания знаков?
Современные автомобили оснащаются интеллектуальными системами помощи водителю (ADAS), среди которых важное место занимает распознавание дорожных знаков. Эта технология помогает предотвращать нарушения ПДД, предупреждает о скоростных ограничениях и других важных дорожных условиях.
Но как именно она работает?

Основные технологии распознавания дорожных знаков
Системы распознавания знаков используют несколько ключевых технологий:
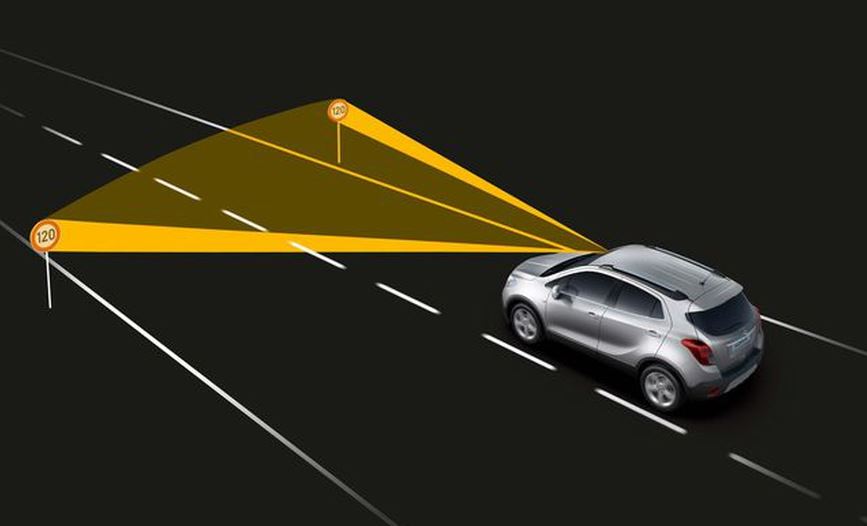
Камеры высокого разрешения – основной инструмент для захвата изображения. Они устанавливаются за лобовым стеклом и постоянно сканируют дорожную обстановку.
Компьютерное зрение – алгоритмы анализируют изображение, выделяя форму, цвет и символы на знаках.
Машинное обучение и нейросети – современные системы используют обученные модели для более точного определения знаков, даже в сложных условиях (плохая видимость, частичное закрытие)
GPS и картографические данные – некоторые системы дополняют распознавание информацией из навигации, чтобы уточнить данные (например, временные ограничения скорости).

Как происходит процесс распознавания?
1. Захват изображения (Detection)
Первым шагом камера, установленная в автомобиле (обычно за лобовым стеклом), фиксирует окружающую обстановку. Современные системы используют:
Высокочувствительные CMOS- или CCD-матрицы – для четкого изображения даже при слабом освещении.
Широкоугольные или телеобъективы – для охвата большего пространства или детализации удаленных знаков.
Инфракрасные или поляризационные фильтры – для снижения бликов и улучшения видимости в дождь или ночью.
Кадры передаются в систему обработки изображений со скоростью 20–60 кадров в секунду, чтобы обеспечить актуальные данные.
2. Предварительная обработка изображения (Pre-processing)
Сырое изображение содержит шумы, блики и лишние объекты. Для улучшения качества применяются:
Коррекция освещения – алгоритмы выравнивают яркость и контраст, чтобы знаки были четче.
Фильтрация шумов – устраняются цифровые помехи (например, из-за плохой погоды).
Выделение контуров – с помощью методов вроде алгоритма Кэнни или преобразования Хафа система находит геометрические формы, похожие на дорожные знаки (круги, треугольники, прямоугольники).
3. Классификация знаков (Classification)
После выделения потенциальных объектов система определяет, какой именно знак перед ней. Для этого используются:
Сравнение с шаблонами – база данных стандартных знаков (цвет, форма, символы) помогает быстро идентифицировать объект.
Нейронные сети (CNN, YOLO, Faster R-CNN) – алгоритмы машинного обучения анализируют изображение, учитывая даже поврежденные или частично скрытые знаки.
OCR (оптическое распознавание символов) – для знаков с текстом (например, ограничения скорости) применяется распознавание цифр и букв.
4. Фильтрация ложных срабатываний (False Positive Reduction)
Не каждый обнаруженный объект – дорожный знак. Система отсеивает помехи, такие как:
Рекламные щиты с похожими цветами.
Отражения в лужах или стеклах.
Декоративные элементы (например, украшения на заборах).
Для этого используются:
Проверка контекста – знаки обычно расположены на определенной высоте и расстоянии от дороги.
Анализ движения – статичные объекты с большей вероятностью являются знаками, чем движущиеся.
Дополнительные датчики – данные с GPS и карт помогают подтвердить наличие знака в данном месте.
5. Вывод информации (Output)
После успешного распознавания система передает данные:
На бортовой дисплей (например, текущее ограничение скорости на приборной панели).
В адаптивный круиз-контроль – для автоматического снижения скорости.
В систему предупреждения – если водитель нарушает правило (например, проезжает под "кирпич").
Некоторые автомобили (например, Tesla или Mercedes) также обновляют карты в реальном времени, фиксируя изменения на дороге.

Где применяется эта технология?
В современных автомобилях (Audi, BMW, Tesla, Mercedes и др.).
В системах контроля скорости и безопасности на дорогах.
В беспилотных автомобилях для автономного движения.
Точность и ограничения
Хотя технология постоянно совершенствуется, она имеет ряд ограничений:
Плохие погодные условия (дождь, снег, туман) снижают точность.
Поврежденные или загрязненные знаки могут быть не распознаны.
Некоторые системы ошибаются при схожих цветах и формах (например, синие информационные знаки и синие указатели).
Будущее технологии
Разработчики работают над улучшением алгоритмов, внедрением инфракрасных камер и интеграцией с системами V2X (обмен данными между автомобилями и инфраструктурой). В будущем распознавание знаков станет еще точнее и будет играть ключевую роль в беспилотном транспорте.
Таким образом, системы распознавания дорожных знаков – это сложный симбиоз аппаратных и программных решений, делающий вождение безопаснее. Однако пока они не идеальны и требуют внимания со стороны водителя.